
Letting George Fly
When I was shopping for a plane two years ago, my goal was to get a capable IFR platform for my instrument training and eventual instrument flight. Not being an instrument rated pilot, I leaned on my friends and flight instructor for advice. The overwhelming response was “you gotta have an autopilot.”
The point simply boils down to safety. While you’re on an instrument flight in instrument meteorological conditions (IMC), you have your hands full. You’re writing down air traffic control (ATC) clearances, responding to ATC commands, monitoring the health of your aircraft and oh yeah, you’re flying the plane. Nothing beats a good autopilot for lightening your load when things get tricky.
As luck would have it, after a few months of “close but not quite what I want” planes, I discovered N96988 at Skywagonsin Placerville just outside of Sacramento. There’s a great story there that I’ll write up one day but the point is that I found the plane I wanted and it came with a great GPS (GNS 480), a MX20 multifunction display (MFD) and best of all an STEC-55x autopilot. When I purchased the plane, I knew it was a capable autopilot but only by what I read, I didn’t have enough experience to put it through it’s paces. Without having an instrument rating, my use of the autopilot has been limited to flying VFR flight plans on long trips (an all too rare occurrence). That all changed this past weekend when Martin, my instructor, and I gave that amazing little box a workout.
It all starts on the ground with a thorough pre-flight inspection of not only the plane but also its autopilot. The pre-flight checklist for the STEC-55x has 44 steps. That is an exceedingly long list of tasks to perform while sitting in the run-up area before takeoff. I’ve often just left the autopilot turned off and not used it in flight for that reason alone. With Martin’s guidance, I labored through all of the steps and gained a greater appreciation of what I was testing at each step as opposed to just making sure the device did what the checklist said. With that understanding, I was able to consolidate a few steps (going from 44 to 41) but more importantly I was able to visually group the steps so the checklist was easier to follow on our next flight.
Once we had confirmed that the autopilot and all its systems were functioning normally, we took off and headed west over the Santa Cruz mountains toward Salinas. I turned on the autopilot and set the heading that my acting ATC (Martin in the right seat) gave me. I then dialed in a vertical airspeed of +600 feet per min and cautiously let go of the controls. It was a leap of faith but sure enough, we stayed on heading and maintained our climb. While still in our climb I was instructed to intercept the V25 (“Victor Twenty Five”) airway to proceed on our course to Salinas. Two taps of the NAV button activated the autopilot’s GPS Steering (GPSS) feature which fed the GPS flight plan to the autopilot. Once the autopilot and GPS started talking to each other, we entered a gradual roll to our right to intercept the flight plan. It’s really amazing being in the seat while these two devices take over flying the airplane.
So it climbs, it turns, and it follows a flight plan, these are all amazing things. However, one of the busiest times on an instrument flight is the approach to landing. You’re flying in the clouds, tracking a course with limited safety margins and descending toward the earth while adjusting the aircraft’s speed and talking on the radio. To get a sense for how the autopilot would perform in this situation, we headed out to Salinas to fly the Localizer DME Runway 31 approach that I had manually flown a few weeks ago.
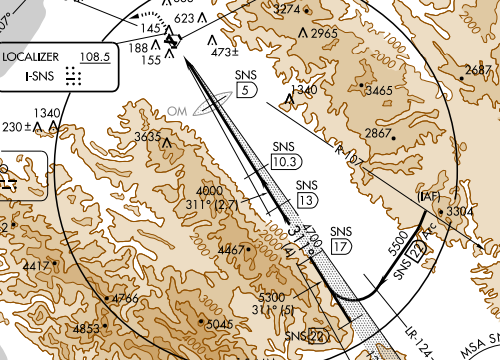
While approaching the Salinas VOR (SNS), I pulled up the approach in the GPS database and activated it for our flight. With GPSS activated, the autopilot flew us out the 107° radial from SNS (R-107). At the initial approach fix (IAF), the autopilot dutifully turned us onto and flew us around the DME arc. For this approach, the final approach leg is defined by a localizer radio rather than GPS coordinates. The navigation data for the localizer is obtained with NAV radios in the plane. The GNS-480 GPS installed in my plane is a combination unit so it handles both GPS signals and NAV signals. With the approach loaded from the database it had already dialed in the NAV frequency for the localizer. As we came around the DME arc, I just had to turn off GPSS on the autopilot and tell the GPS to start using the NAV signals. With two button presses we intercepted the localizer and began heading toward the airport.
Once we were established on the localizer, I selected the APR (approach) mode button on the autopilot to let it intercept the glide slope (defined by another radio signal). Once the glide slope (GS) indicator appeared on the autopilot, it began flying us down the approach toward the airport. This was our first approach using the autopilot in my plane and unfortunately there were clouds at about 2000’ feet so we didn’t feel comfortable flying the whole approach to the ground. We didn’t want to be fumbling with the autopilot controls while we were in the clouds. Just before we cancelled the approach, it hit me how powerful these tools were and what a safety advantage they could provide.
Not content with a partial approach, we headed toward clearer skies over Watsonville where we flew the VOR DME approach until we were once again thwarted by low clouds. From Watsonville we headed east to Tracy where we were able to fly a fully coupled (that’s the autopilot flying) GPS approach then manually initiate the missed approach followed by reactivating the autopilot to complete the missed approach procedure. What an amazing ride!
On our way back to San Carlos we were feeling pretty confident in the autopilot’s capabilities and our understanding of its operation. There was layer of clouds over the Livermore airport but they were thin and the bottoms were reported to be around 2000’ so there was plenty of room underneath them. We decided this left us with an acceptable safety margin to fly the ILS RWY 25R approach coupled to the autopilot. As we were cleared for the approach, we slowly descended into the clouds with yet another leap of faith. Monitoring all the gauges, the autopilot seemed to be doing a great job of keeping on course and on the glide slope. I had my thumb hovering over the autopilot disconnect switch and was ready to push it at the slightest hint of things going wrong… my faith only goes so far. I needn’t have worried, after less than 1000’, we came through the bottom of the clouds with runway 25R was dead ahead. Well done George!
Oh, about the title of this post, I have frequently heard the autopilot referred to as “George” and I’ve picked up the habit as well. After many weeks of training the old fashioned way, Martin and I decided to “let George fly” this weekend. Writing this post inspired to do a little research on this topic (ok, a quick Google search) and if the Internet speaks the truth for once, it appears that a man by the name of George DeBeeson was an early pioneer of autopilot technology. If that’s the case, I really learned to appreciate his work this weekend and I’m happy to have his help.